


Overview
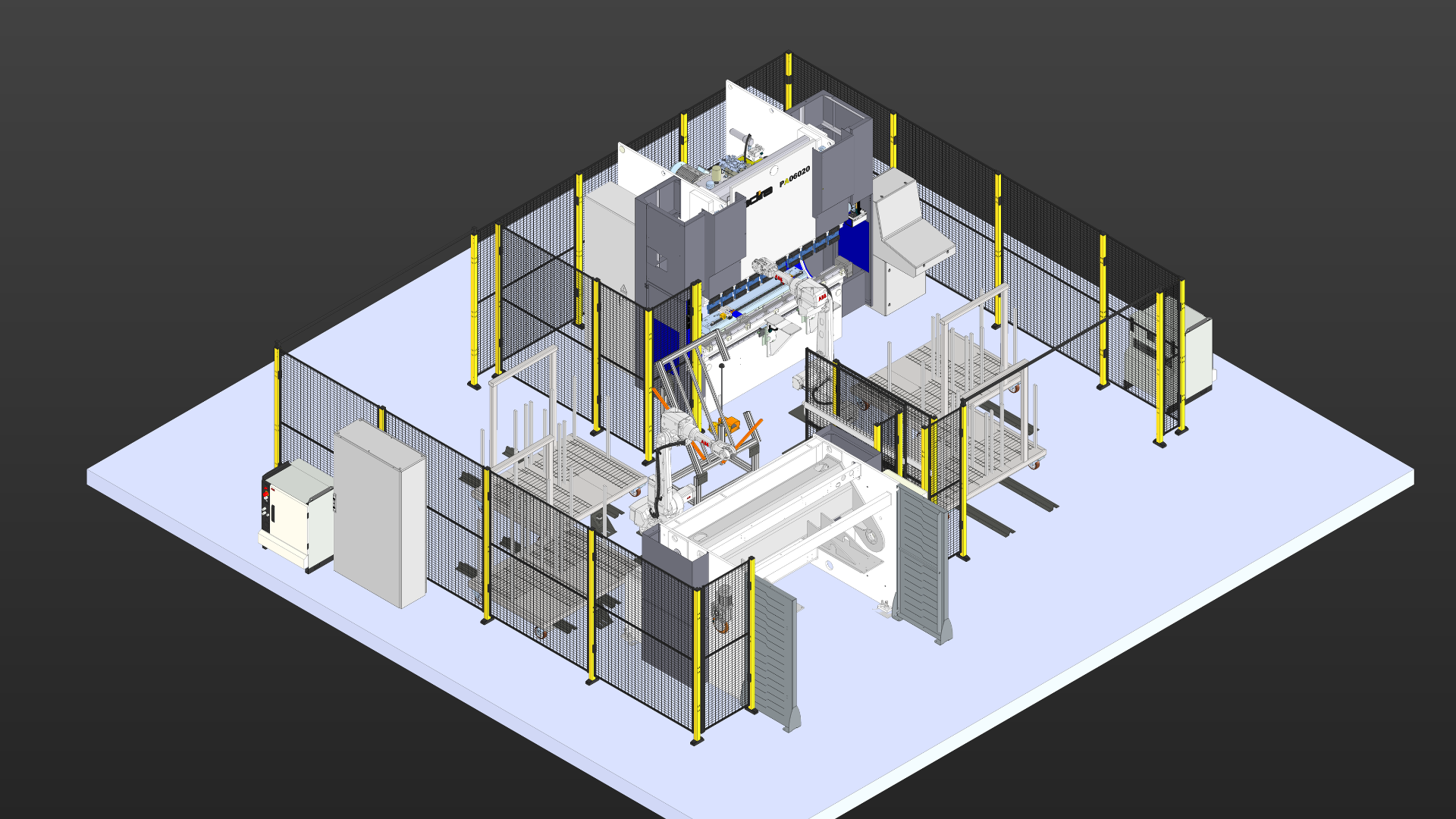
Coordinated dual-robot cell for automated metal sheet processing, integrating cutting, bending and handling operations within a synchronized industrial workflow.
Objective
Develop a fully automated robotic system capable of executing multi-step metal processing with precise coordination, continuous flow and high repeatability.
System
Two industrial robots operate within a shared workspace under a centralized control architecture, integrating picking, cutting, bending and placement into a single coordinated sequence.
Execution
Motion planning and task sequencing ensure synchronized operation between robots, enabling stable interaction, continuous material flow and precise positioning across all stages of the process.
Technology
Result
A fully integrated multi-robot system delivering precise, repeatable and autonomous metal processing, combining synchronization, control and industrial robotics into a single coordinated solution.

.svg)
.svg)