


Resumen
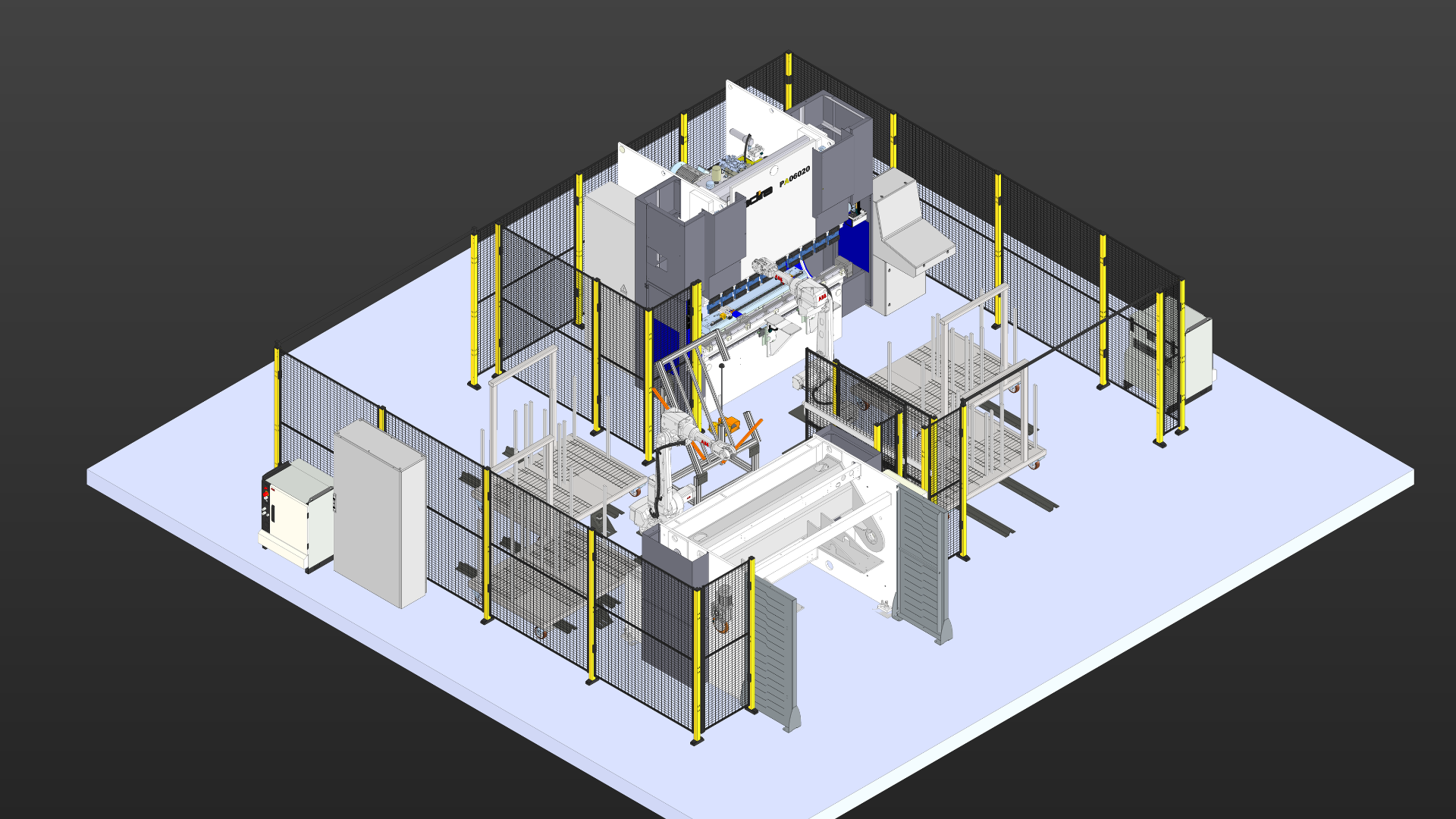
Célula coordinada de dos robots para el procesamiento automatizado de chapas metálicas, que integra operaciones de corte, plegado y manipulación dentro de un flujo de trabajo industrial sincronizado.
Objetivo
Desarrollar un sistema robótico totalmente automatizado capaz de ejecutar procesos de mecanizado de metales de varios pasos con una coordinación precisa, un flujo continuo y una alta repetibilidad.
Sistema
Dos robots industriales operan en un espacio de trabajo compartido bajo una arquitectura de control centralizada, integrando las operaciones de recogida, corte, plegado y colocación en una única secuencia coordinada.
Ejecución
La planificación de movimientos y la secuenciación de tareas garantizan un funcionamiento sincronizado entre los robots, lo que permite una interacción estable, un flujo continuo de materiales y un posicionamiento preciso en todas las fases del proceso.
Tecnología
Resultado
Un sistema multirrobot totalmente integrado que ofrece un procesamiento de metales preciso, repetible y autónomo, y que combina la sincronización, el control y la robótica industrial en una única solución coordinada.

.svg)
.svg)