


Overview
Robotic palletizing system developed for PANIAGUA, combining real-time decision-making, dynamic pallet optimization and industrial automation.
Objective
Design an adaptive palletizing system capable of integrating multiple production lines and optimizing stacking in real time under variable conditions.
System
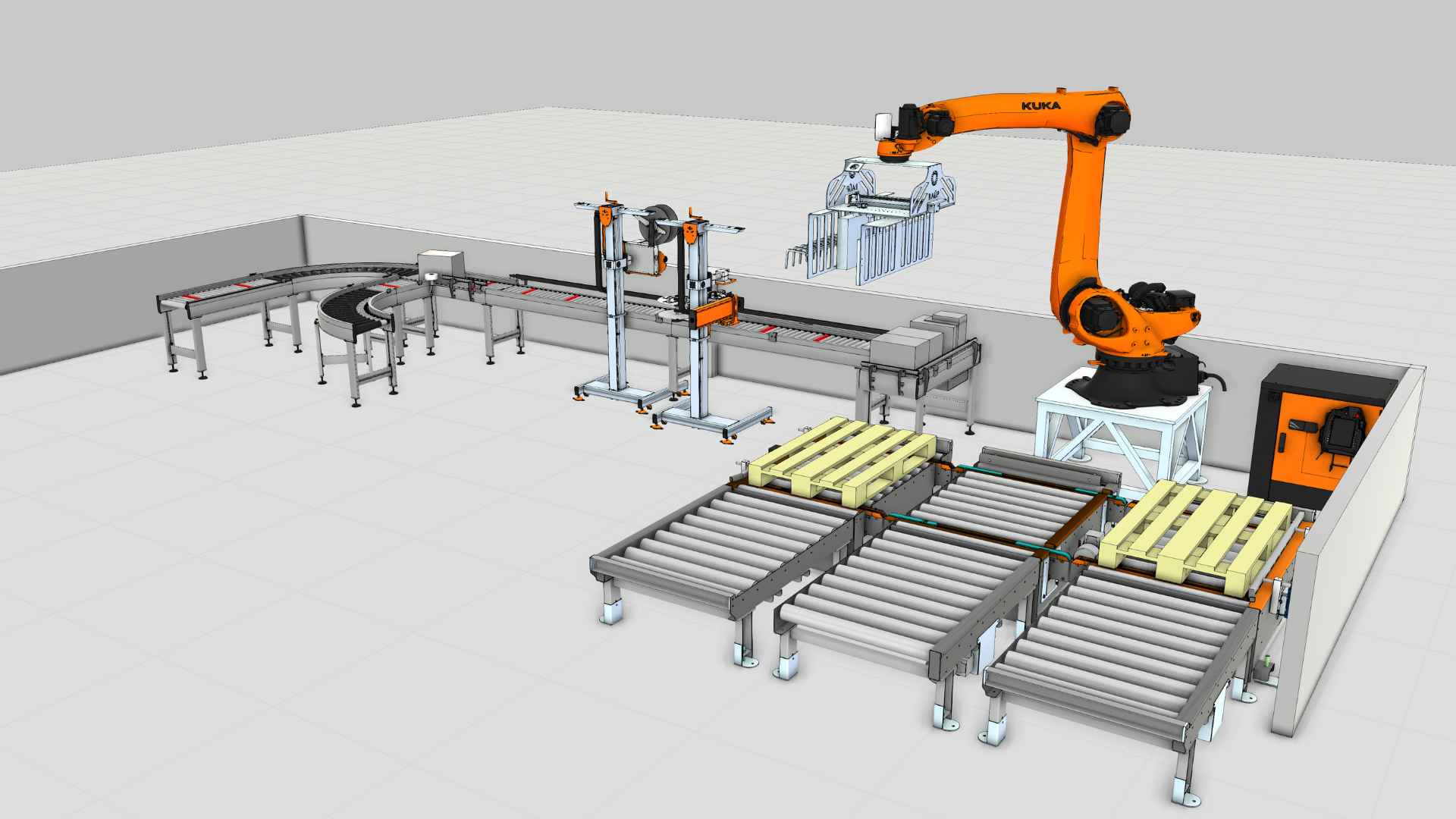
A KUKA industrial robot performs palletizing operations, supported by a distributed control architecture based on Beckhoff.
A dedicated decision layer computes pallet configurations dynamically, adapting to product type, sequence and flow.
Execution
The system operates without predefined layouts, generating optimized stacking patterns in real time while coordinating input from two independent multi-product lines.
Technology
Result
An adaptive palletizing system capable of optimizing each pallet in real time, improving efficiency and coordination across variable production environments.

.svg)
.svg)