
Overview
Internal R&D exploring adaptive robotics and real-time human-robot interaction through AI-driven perception systems.
Objective
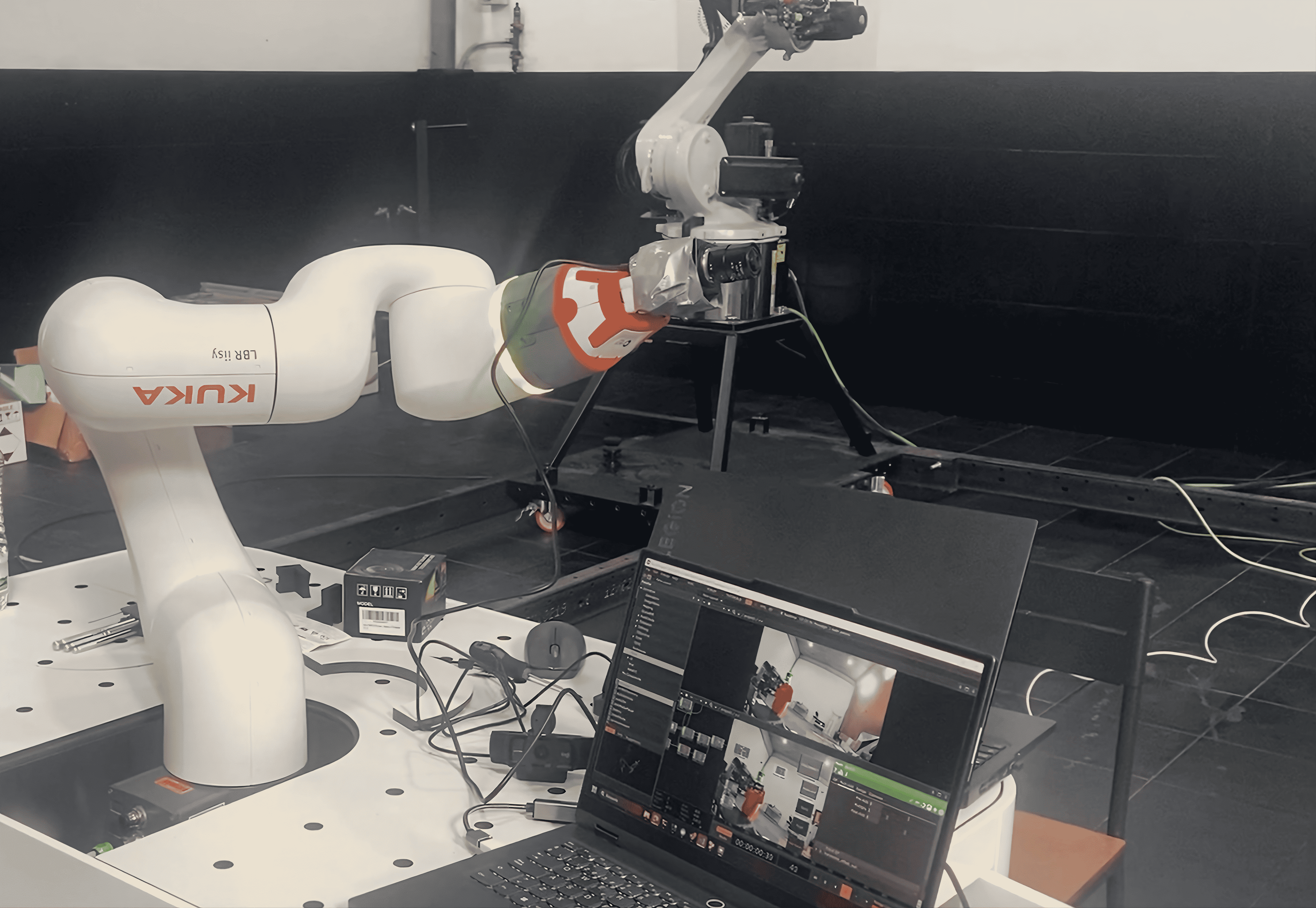
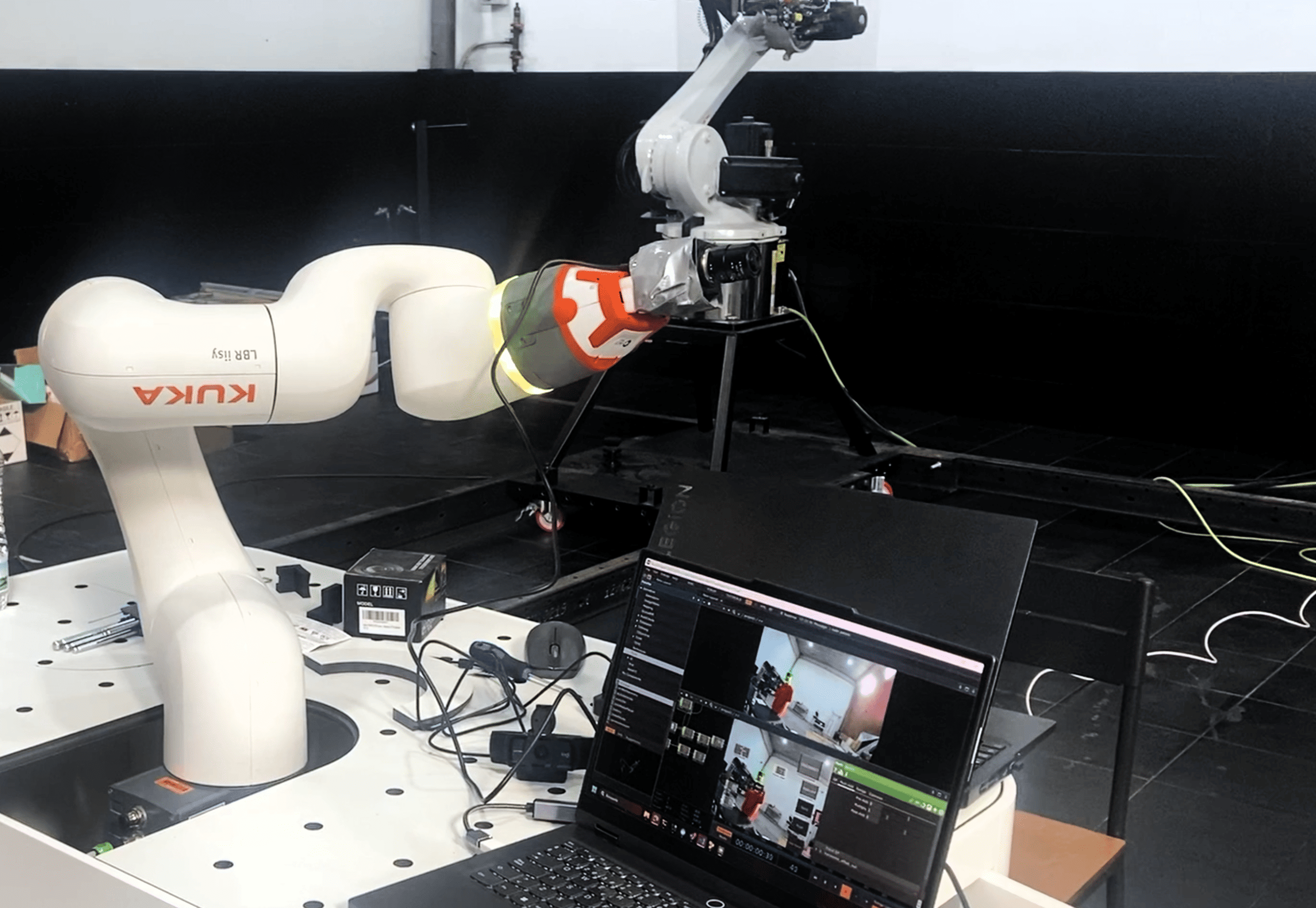
Development of a real-time human tracking system using a KUKA iisy robot, combining camera vision, AI-based face tracking and custom motion control.
System
Integration of visual perception, tracking algorithms, custom inverse kinematics and interactive software into a unified real-time control architecture.
Execution
The system detects and tracks human presence through camera input, processes data using AI models and generates responsive robot motion dynamically, without relying on predefined sequences.
Technology
Result
A perception-driven robotic system capable of sensing, interpreting and responding to human presence in real time, advancing BAÜP’s research into adaptive, non-linear robotic behavior.

.svg)
.svg)