
Resumen
I + D interno dedicado a la robótica adaptativa y a la interacción en tiempo real entre humanos y robots mediante sistemas de percepción basados en IA.
Objetivo
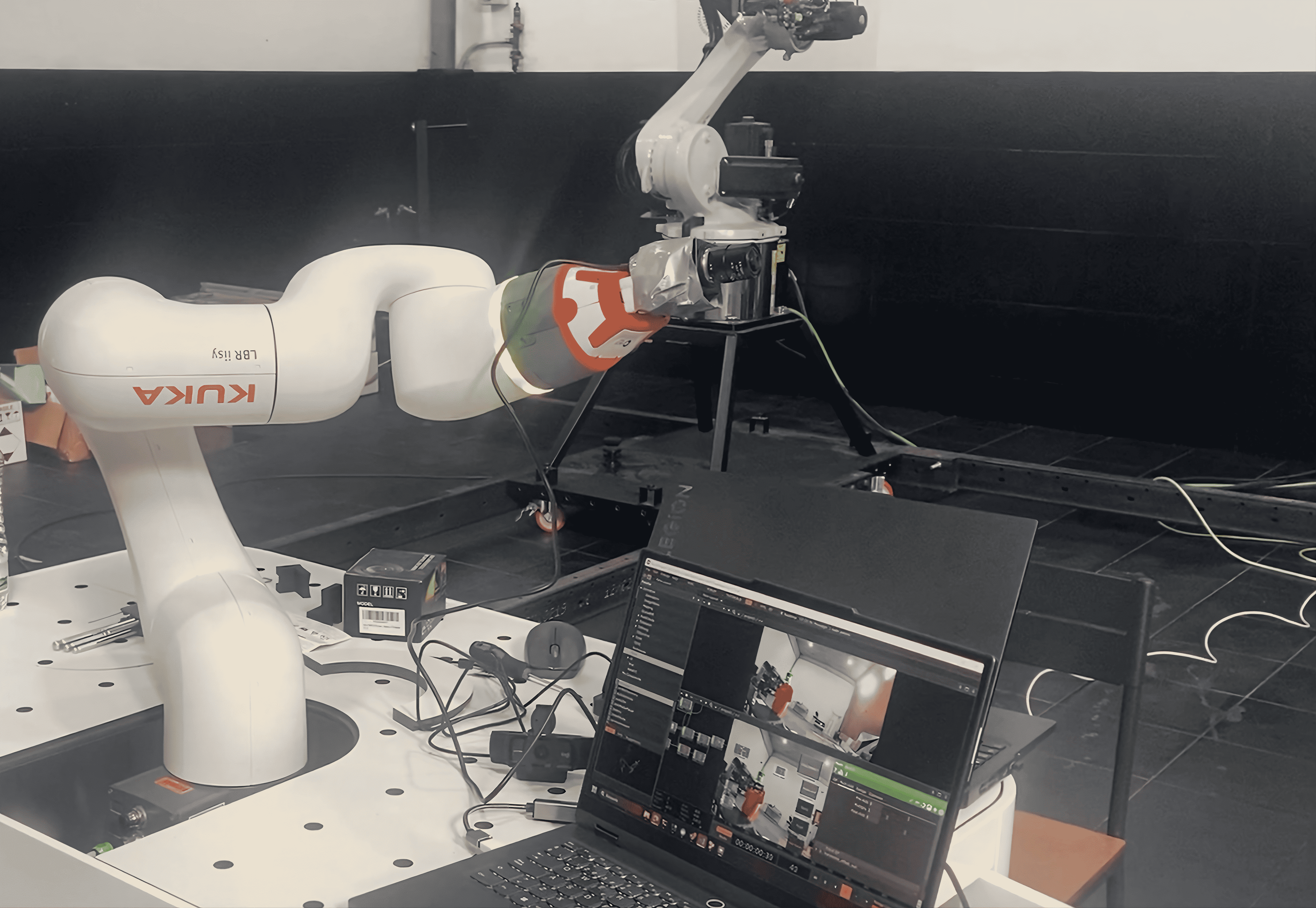
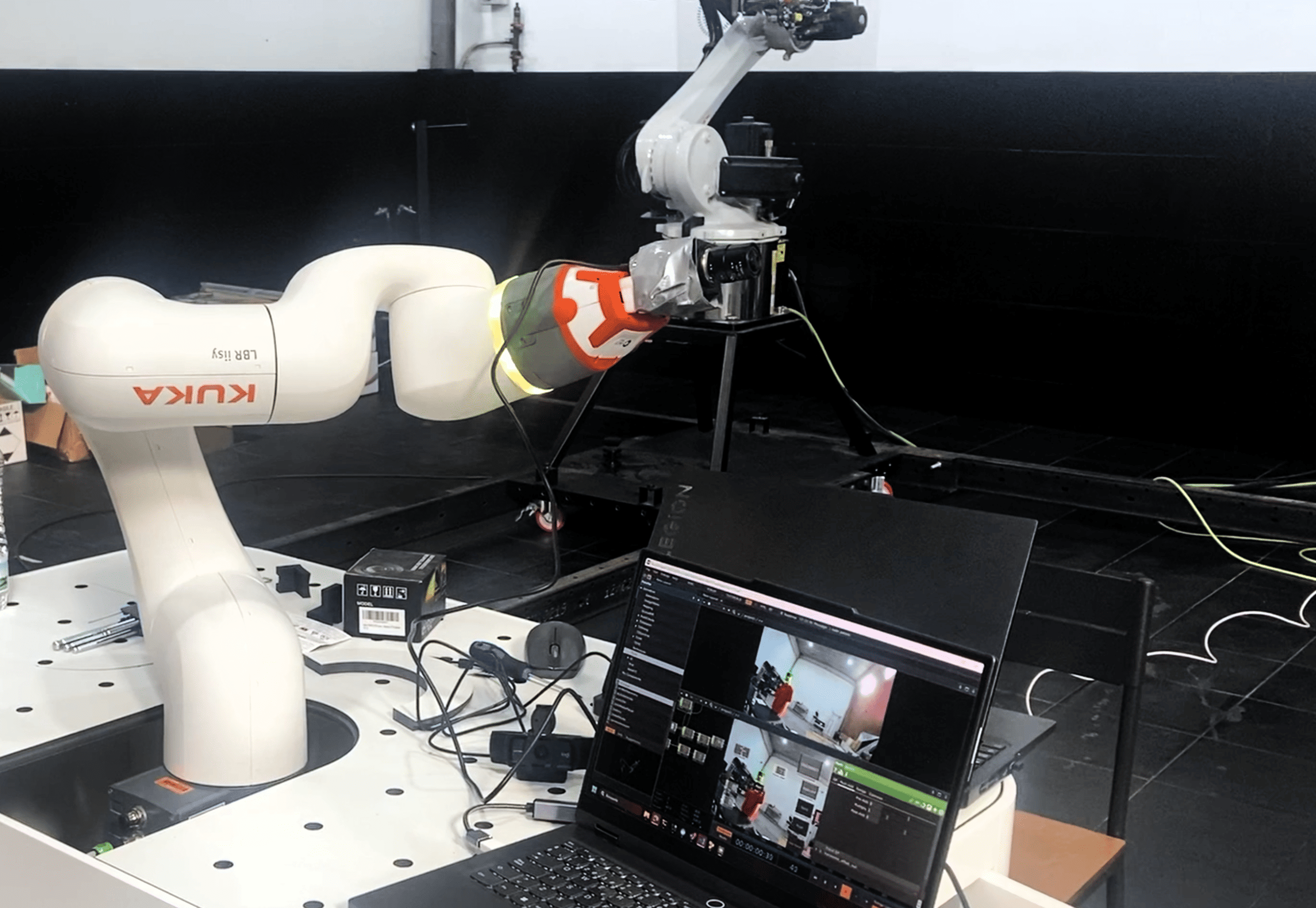
Desarrollo de un sistema de seguimiento de personas en tiempo real utilizando un robot KUKA iisy, que combina visión por cámara, seguimiento facial basado en IA y control de movimiento personalizado.
Sistema
Integración de la percepción visual, algoritmos de seguimiento, cinemática inversa personalizada y software interactivo en una arquitectura de control unificada en tiempo real.
Ejecución
El sistema detecta y rastrea la presencia humana a través de las imágenes de la cámara, procesa los datos utilizando modelos de IA y genera movimientos robóticos adaptativos de forma dinámica, sin depender de secuencias predefinidas.
Tecnología
Resultado
Un sistema robótico basado en la percepción, capaz de detectar, interpretar y responder a la presencia humana en tiempo real, lo que supone un avance en la investigación de la BAÜP sobre el comportamiento robótico adaptativo y no lineal.

.svg)
.svg)