

Resumen
Instalación experimental que explora la precisión en robótica industrial, traduciendo la exactitud submilimétrica en una experiencia visual y comprensible.
Objetivo
Demostrar el concepto de precisión robótica de forma intuitiva, haciendo perceptible la exactitud industrial para públicos no técnicos.
Sistema
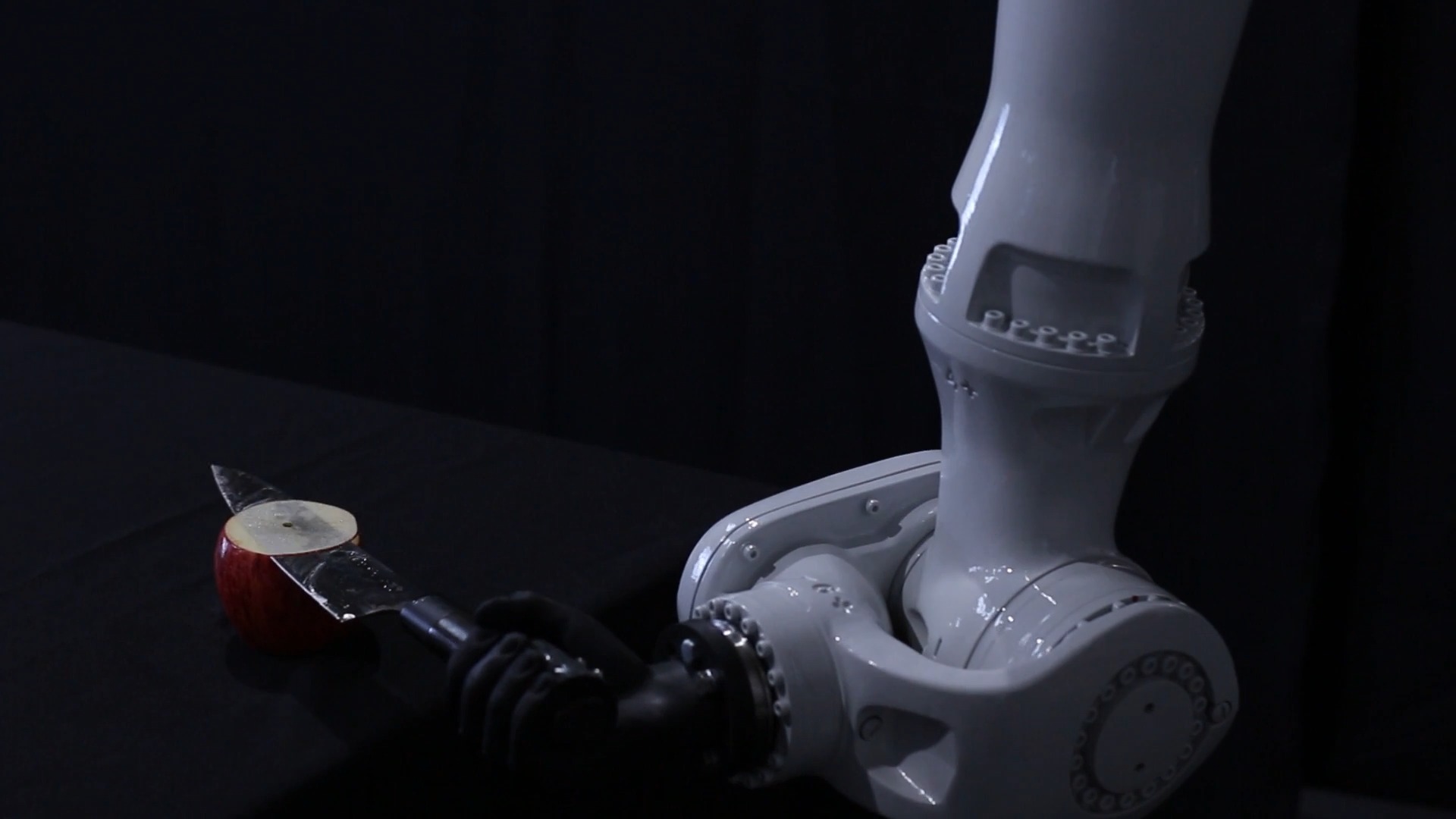
Se utilizó un robot KUKA KR20 HO como sistema principal de movimiento, equipado con una herramienta de corte. El sistema permite ejecutar movimientos con una repetibilidad muy superior a la capacidad humana.
Ejecución
Inspirado en enfoques visuales como los de Ryota Togishi, el movimiento robótico se traduce en una acción tangible: el corte de láminas de manzana de espesor ultrafino. El robot ejecuta trayectorias controladas para generar cortes de aproximadamente 0,1 mm, haciendo visible la precisión a través de la materia.
Tecnología
Resultado
Una demostración donde la precisión industrial se convierte en algo visible y tangible, transformando un concepto técnico en una experiencia directa, medible y comprensible.




.svg)
.svg)
